Pajtaajtó mechanika (Kajfis Tamás)
Sziasztok!
A Pajta ajtó mechanika (Backdoor tracker) nagy érdeklődésre elkészítettem egy leírást, mit hogyan kell csinálni mire van szükség.
Backdoor tracker alkatrészek:
Rézvezeték, bárhonnan lehetőleg 6 különböző színű, ha nem látjátok át az elektronikát (egy nagyon egyszerű áramkörről van szó!) Előre fúrt nyáklap amire forrasztunk. Forrasztó páka, ón/cin ki hogy hívja, szike/ éles kés a vezetékek blankoláshoz.
Mechanikai alkatrészek:
- 2db, 608zz csapágy – ebay vagy csapágy bolt
- 1db, M5 átmenő csavar – OBI (ezeket szokták p.l bojler felszereléshez használni(nem az M5-öst mert ez leszakadna:) ott találhatóak meg), hozzá anya 4db minimum
- 1db, 8mmX70mm Csavar+Anya+Alátét 2db
- 3db, 4mmx30mm csavar+anya
- Fotó csavar a gömbfej rögzítéséhez
- Gömbfej (nekem egy olcsó van eddig, ami ebay-es, de most találtam egy olcsót és elég jó minőségűt)
- Vastag befőttes gumik(rezgés csillapítás és átesés miatt) nem szükséges.
A legnagyobb fejtörést az elektronika összerakása jelenti számotokra így inkább csak arra koncentrálnék jobban. Az összeszerelés szerintem adja magát. Az alsó és felső rész csatlakozásait erősen meg kell húzni csavarokkal pillantóragasztót is lehet használni. A csapágyakat az alsó FIX rész két nagyobb lyukába kell beleilleszteni, ebbe megy bele a nyíló rész és át a 8mm csavar, mind két végét alátéttel illik megfogni nem kell erőből meghúzni de azért szoruljon. Az átmenő csavart valami íves felületen pl egy nagyobb kaspón lehet hajlítani ez úgy is szorulni fog mikor összerakjátok én ott finomítottam az íven addig míg majdnem akadás mentesen lehet nyitogatni. A nagyobb fogaskerékbe M5-ös csavart kell rakni kevés pillanatragasztóval, hogy ne essen ki ügyelve arra, hogy a menetbe ne kerüljön anyag, mert utána elég nehéz kikapargatni. A nyíló részen erősen két oldalról rögzítsük az átmenő csavart a fix részén pedig egy anyát rakjunk, hogy ne essen át. A képek magukért beszélnek:






Elektronika:
Mivel már összeraktam így nincs kedvem megbontani a dobozkáját. Fritzing segítségével megrajzoltam, minek hova kell mennie. Fontos a polaritásra ügyeljünk vagy füstjelekkel fog elköszönni tőlünk. Létezik egy IC verzió is ami ugyan azt a kódot tartalmazza mint amit a Nano-onkra töltünk fel, ez is mikroprocesszor de ez nem tud komplexebb dolgokat csinálni, de ez egy másik történet. Nézzük a kapcsolási rajzot (mindent a képhez viszonyítva írok le):
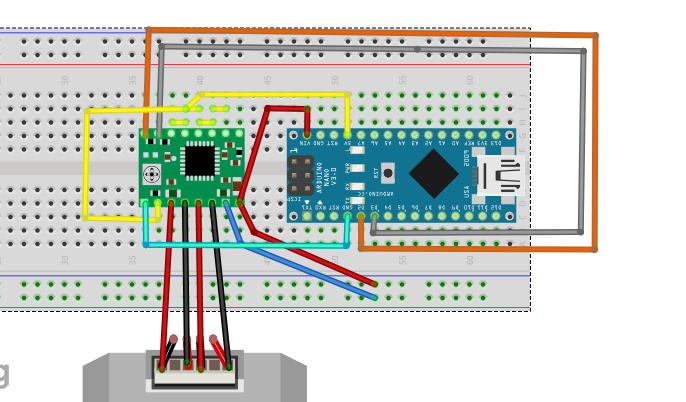
Motorvezérlő:
Motorvezérlővel a kiindulási pontunk, a felső lábkiosztás balról jobbra haladva: narancssárga és szürke vezetéket ami a lépésekért felel ez kapcsolgatja a tekercseket a motorban a Nano D2- D3 pinjéről. A sárga itt főleg a mikrólépések miatt van az összes hidalva így érjük el, hogy a A4988 vezérlőnk 1/16 lépésben vezérelje a motort, ez röviden annyit tesz, hogy míg a motor 1-et lépne ezt 16 apró lépésben éri el, így nagyon finom mozdulatra képes, tehát ebben az esetben 200*16 és 5V-ot kap a Nano-tól. Az utolsó lábat nem kel kötni sehova. Motorvezérlő alsó lábkiosztás balról jobbra haladva: a cián színű vezeték nem más mint a GND (negatív) a Nano-val kapcsolva, sárga vezeték 5v kap a Nano-tól, a következő 4 vezetéket jelölhettem volna más színnel, de zavaró lenne a lényeg hogy ebben a sorrendben kell bekötni a motorba, megjegyzés a 1-2-3-4-ről 4-3-2-1-re a motor másik irányba fog forogni. Kék kábel úgyszintén negatív, viszont itt már kapja az elektronika a külső táp az én esetemben 5V-ját, utolsó kábel piros itt a plusz 5V jön be a vezérlőhöz és a Nano VIN pin-jére ami annyit tesz, hogy feszültség bemenet. FONTOS csak is itt kaphat áramot a Nano meg úgy az összes ilyen rendszer, USB-én kívül. A Nano képes 12V-ról is üzemelni a VIN pin-ről, de én ezt értelmetlennek tartom mikor egy PowerBank képes ellátni, a fogyasztás nagyjából 200mAh NANO, motor 500mAh (MAX, )itt nincs változó terhelés, egyenletesen kis nyomatékkal megy, bőven elég az emeléshez így is nagyon nagy áttételű a rendszer és szerintem bőven meg tud emelni 5kg-ot.
Nano flash-elése:
FONTOS! Nano flashelés alatt kizárólag csak az USB legyen rádúgva ezt csinálhatjuk forrasztás előtt vagy után, de így 100%-os hogy nem vágunk haza semmit. Netről szerezzétek be a CH340 USB drivert a megfelelő oprendszerhez, telepítsétek a driver-t. Kell hozzá még Arduino IDE amit innen tölthettek le, ezzel flash-elünk. Van egy AccelStepper library , amit ki kell csomagolni. A megjegyzés a kódban „//” kommentet jelöl én is kommenteltem bele egy helyen mivel itt kell megadni a letöltött library elérési útját.
A kód:
// 2017 Chris Dakin
// Barn door tracker
#include <D:\Program Files\astro\barndoor tracker\barndoor\AccelStepper.h>
// ITT van az elérési út így adjátok meg a
//saját mappátoknak megfelelően
//minta <MAPPA\Fájlnév\>
// Define a stepper and the pins it will use
AccelStepper stepper(1, 3, 4);
long maxPos = 500000000;
// big cog needs to go at 1.09 rpm at 4.3:1 ratio
// so stepper needs to be at 15.62 steps/sec
// at 1/2 step = 31.25
// at 1/4 step = 62.5
// at 1/8 step = 125
// at 1/16 step = 250 Let’s run at 1/16 steps
int motorSpeed = 250;
bool directionInvert = false;
void setup()
{
stepper.setMaxSpeed(motorSpeed);
stepper.setAcceleration(1000);
stepper.setPinsInverted(directionInvert);
}
void loop()
{
stepper.moveTo(maxPos);
stepper.run();
}
Indítsátok el az Arduino IDE-ét másoljátok be a kódot, módosítástok a library elérési útját, a Tools-ban ki kell választani az eszközt Board-alatt és a portot, a port számot az eszközkezelőből tudjátok meg a Soros portoknál talán így van magyarul (nekem minden angolul van):

Majd a kis jobbra nyíllal fel lehet tölteni. Ha mindent jól csináltatok és feszültséget adtok a renszernek akkor a motor lassan el kezd forogni. (Az oldalon található képek és leírás forrása.)
Kajfis Tamás


{kind=link}