Követés mikrokontroller, számítógép és léptetőmotor nélkül – Varga Zsolt
Dobson és azimutális távcsövek motoros követésének egy egyszerű és olcsó megoldását szeretném bemutatni ebben a cikkben. A vezérlést és a mozgatást a saját, 340/1740-es igen méretes, azimutálisan szerelt Newton távcsövemen keresztül mutatom be, de némi fantáziával és alkotókészséggel bármilyen Dobsonra vagy akár ekvatorális mechanikára felszerelhető egyszerű szerszámok segítségével is.
A távcsövemet 2018-2019-ben eleve követéssel építettem, méghozzá egy EQ5-re való szokásos gyári követéssel. Sokat bíbelődtem a helyes fogaskerékpár megtalálásával, és nem is sikerült száz százalékos eredményt elérnem. Az éles észlelések során nagyon hamar kiderült, hogy bizony nem elég az óratengelyt forgatni egy AZ távcső esetén, ugyanis a szerelés sajátosságaiból kifolyólag a csillagok „sréhen” kivándorolnak a látómezőből, és nagyobb, 200x-os nagyítás környékén ez a vándorlás már meglehetősen gyors. Ez roppant zavaró volt, és csak a távcső bökdösésével, vagy a meglehetősen távol lévő kezelőszervek tekergetésével volt újrapozícionálható a megfigyelt égitest. Nagyon kényelmetlen volt az észlelés így, ezért megfogalmazódott bennem a gondolat hogy kéne motor a deklinációs tengelyre is.

Viszont elgondolkodtatott, hogy milyen sebességű motorra lesz szükségem, miként fogom szabályozni, hisz egyáltalán nem mindegy a sebesség tekintetében, hogy zenit közelében, vagy a horizont környékén észlelünk. Értelemszerűen zenitben szinte nincs is szükség a deklinációs tengely mozgatására, míg a horizont közelében viszonylag nagy szögsebességre van szükség. Az elmélkedést tovább fűzve beláttam, hogy a zenittől északra meg egyenesen ellentétesen kell mozognia a deklinációs tengelynek, sőt tulajdonképpen az égbolt minden egyes pozíciójában más és más sebességkombinációkra van szükség ahhoz, hogy a csillag, vagy a kiszemelt objektum pozícióban maradhasson.
Ezt egy számítógép vezérelt rendszer képes megoldani léptetőmotorok, és megfelelő programmal egy betanítás után, de ezek a rendszerek elég drágák, és talán nem is adaptálhatóak minden távcsőhöz. A platform nálam szóba se jöhetett a távcsövem méretéből kifolyólag. Egyéb megoldást kellett találnom.
Egy teljesen más jellegű beszélgetés során hallottam egyik barátomtól a pwm-ekről és nyomatékmotorokról. Ez felkeltette a kíváncsiságomat, és utána olvasva meg is fogalmazódott bennem a megoldás, hogy miként lehet gyakorlatilag bármilyen távcsövet olcsón, egyszerű eszközökkel, minimális elektronikai és barkácsoló tudás segítségével követéssel ellátni.
Természetesen kizárólag vizuális észleléshez jó az általam a következőkben ismertetendő követés, mert a csillagok forognak a látómezőben, és hosszas észlelés közben többször kell korrigálni manuálisan a sebességét a deklinációs motornak, de ezek a gondok semmiféle gyakorlati nehézséget nem okoznak vizuális észlelés esetén, és már néhány perc után is magától értetődő természetességgel nyúlunk a beállító szervekhez
Lássuk magát a szerkezetet:
Hozzávalók:
1) Két darab egyenáramú (DC), 12 voltos nyomatékmotor. A távcső méretétől függően 16-26-37 mm átmérővel. Az RPM (fordulat/perc) 2 de maximum 4 legyen. Ezek nagyon erős motorok, gyakorlatilag kézzel lefoghatatlanok. Nálam a 35 kilós tubust és a mechanikát roppant könnyedén forgatja a 37mm-es motor. A 26mm-est bátran ajánlom 200-asig. A motorok hat milliméteres tengelyén ki van alakítva gyárilag egy egyenes felület ahol remekül lehet rögzíteni bármilyen kereket, fogaskereket egy csavar segítségével. Nagyon meggyőzőek ezek a motorok, különösen a 37mm-es robosztus darab.
2)Két darab PWM egyenáramú motorvezérlő, mégpedig olyan típus, melyen található potméter, és irányváltó kapcsoló is. Oda kell figyelni, hogy olyat vegyünk, amelyikkel a fordulatszámot legalább maximális fordulat 10%-ig lehet leszabályozni, de még jobb az a típus (kicsit drágább), amelyikkel gyakorlatilag nulláig szabályozhatunk. Ezeknek az elektronikáknak hatalmas előnye, hogy a DC motorok fordulatát a potméterrel analóg módon lényegi nyomatékveszteség nélkül lehet csökkenteni az elektronikának köszönhetően.
3)Egy darab, legalább 1 amperes, 12 voltos egyenáramú tápforrás, ami lehet bármiféle otthon kallódó telefontöltő, vagy akkumulátor is.
4) Egy szerelődoboz, amibe rögzíthetjük a pwm-eket, ahová szerelhetünk főkapcsolót, tápbemenetet, ahol a csokik vannak, és ami óvja az elektronikát.
5) Mechanikai elemek melyek fixen tartják pozícióban a motorokat. A motorok annyira erősek, hogy slendrián szerelés esetén az erős motor elemeli magát, vagy elcsavarja a felfüggesztést.

Beszerzés, ár
A szükséges motorok és pwm-ek beszerzése az ismert kínai oldalakról összességében néhány dollár, és sok esetben nem kell két hét sem a csomag megérkezéséig, de ez lehet akár két hónap is. Aki gyorsan akar biztosra menni, az a Magyarországon működő, robotikával foglalkozó webshopból is rendelhet mindent. Igaz ebben az esetben tripla az ár, és így egy ilyen szett kb. 30 ezer forint szállítással együtt. Ugyanazt a kínait kapjuk, tehát aki nem siet, az rendeljen Kínából.
A tápegység, és egyéb kiegészítők a legtöbb háztartásban megtalálható újrahasznosított eszközökből is készülhetnek.
Csak írjuk be a keresőbe hogy pwm és nyomatékmotor, és a kijövő oldalakon kedvünkre válogathatunk a különböző lehetőségek közt. Félelmetes variációs lehetőségek vannak, a digitális kijelzőkől, a rádiós irányításig. Én azt vallom, hogy a kevesebb több, de ítt tényleg szárnyalhat a fantázia. A nyomatékmotorok választéka is lenyűgöző, szinte bármit alkothatunk. Jelesül akár motoros fókuszírozót is néhány ezresből….
Szerelés
1) PWM-ek nálam a 4. képen látható dobozba kerültek. A nyáklapok alá bakelitet tettem, és ezt a bakelitet rögzítettem a dobozhoz, hogy a nyáklapot ne érje mechanikai erő. A pwm-ek bekötése egyszerűen oldható, csokis bekötések, tehát még forrasztani sem kell semmit, csak helyükre rögzíteni a vezetékeket. A nyáklapon a bekötés feliratozása magáért beszél és egyértelmű: M1, M2, +,- . Azaz motorhoz elmenő egyik vezeték, motorhoz elmenő másik vezeték, a pwm-be bejövő plusz, pwm-be bejövő mínusz. De pontos rajzot kapunk a pwm-hez, tehát minden adott a gondos munkához.
FIGYELEM!!!! A PWM nem polaritás védett, ezért nagyon ügyeljünk a helyes polaritásra a bekötésnél, inkább többször mérjük meg, hogy a plusszunk, valóban a plusz-e? Ha rosszul kötjük be az áramot, akkor azonnal leég a pwm, nincs tűrése.

Jómagam a doboz tetején helyeztem el kezelőszerveket, azaz a főkapcsolót (amivel el tudom venni az áramot az egész szerkezettől), a ventilátor kapcsolóját, az irányváltó kapcsolókat, és a potmétereket is. Annak érdekében, hogy ne kelljen bontani a dobozt az esetleges későbbi áthelyezések esetén, vagy a tubus karbantartása miatt, én rászereltem egy dugaljat amit egy régi modemből szereltem ki. Ide csatlakozik a tápegység dugója. Ha ilyet csinálna más is, akkor itt nagyon figyeljen arra, hogy a dugaljból a pwm irányába menő vezetékek közül tényleg a plusz menjen a pwm plusz csatlakozási pontjára, mert itt bizony lehet hibázni. A dugalj belső oldaláról szétágaztattam a vezetékeket, és úgy mennek a vezetékek két pwm-hez.
Az összes kimenő vezetéket egy, a doboz külsején elhelyezett sorkapocsba vezettem ki, és ténylegesen ebből a sorkapocsból megy minden vezeték a motorokhoz, illetve nálam a főtükör hűtő ventillátorához is. Végül a dobozt rögzítettem a távcsőhöz. Tehát ha távcsőkarbantartás van, akkor elég csak a sorkapocsból kikötni a vezetékeket, nem kell bontani a dobozt, és a dobozon belül kikötni bármit is.

A sorkapocsból kijövő vezetékeknél nem számít már a polaritás, itt csak arra kell ügyelni, hogy mind a két motort egyformán kössük be, mert különben zavaró az irányváltó kapcsolók ellentétes állása. Ez csak esztétikai kérdés ugyan, de semmiből nem áll erre figyelni. Ha valaki esetlegesen használ ventillátort, és hozzám hasonló módon a vezérlés dobozába helyezi a kapcsolóját, akkor ott számít a polaritás, tehát azt polaritás helyesen kössünk be.
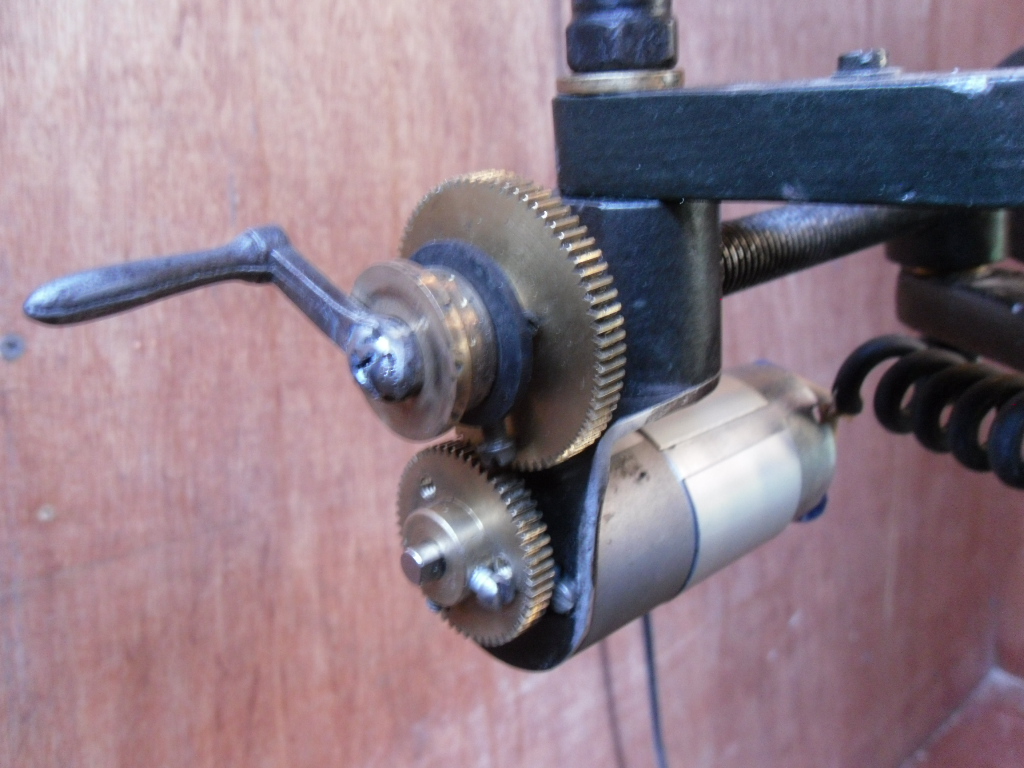
Motorok felfüggesztése:
Az én mechanikámra elég nehézkes volt a motorok felszerelése, mert maga a menetes szár is fordul a felfüggesztésen, miközben egyidejűleg halad a menetben is. Ezért én elég bonyolult módon tudtam csak megoldani a motor elhelyezését oly módon, hogy a tuskóknak (melyek fordulnak a szárral) az aljára rögzítettem őket. Ráadásul a menetes szárak nem tesznek lehetővé végtelen mozgást, így valahogy meg kellett oldani azt, hogyha a szár felütközik, és mozdíthatatlanná válik a hajtókar, akkor ne égjen le a motor, vagy ne darálja le a fogaskereket. Én ezt egy egyszerű kuplungszerű megoldással oldottam meg, tehát ha a végére ér a hajtás, akkor a motor tudja még forgatni a fogaskereket, de az már a kuplungon keresztül nem tudja átadni az erőt a szárnak.
Akinek hasonló mechanikai (tehát nem végtelen) rendszere van, az készíthet elektromos jelzőcsengőt, végállás kapcsolót, bármit. Lehet alkotni, és kitalálni jó dolgokat.
Fontos!
Mindenképpen oldhatóra kell készíteni a motor és a mechanikát megmozdító fogaskerék (vagy egyéb erőátadó pont) találkozását, mert különben az égbolton való gyors átállások nem lehetségesek. Erre mindenki gondoljon a tervezésnél. Abba ne gondolkodjon senki, hogy vesz egy 100 rpm-es motort, és akkor villámgyorsan át tud állni az egyik objektumról a másikra. Igaz hogy nulláig szabályozható a fordulat, és az erő sem vész el, ráadásul nagyon látványos, ahogy gyorsan átforog a távcső az egyik pontból a másikba, de egy potméternél eltalálni egy 100 rpm-es motornál, hogy a követés mondjuk 0.2 rpm vagy még kevesebb legyen…. nos, szinte lehetetlen, ugyanis annyira keveset kéne mozdítani a potméteren, hogy arra emberi kéz képtelen. Azt javasolnám, hogy senki ne vegyen 4 rpm-nél gyorsabb motort.
Használat:
Azt gondolom elég értelemszerű a használata.
1) Az égbolt bármely területén kiválasztjuk a megfigyelendő objektumot.
2) Maximális nagyítású okulárt helyezünk be.
3) Bekapcsoljuk a motorokat, és a pótméterekkel addig szabályozzuk a motorok sebességét, amíg a kiválasztott objektum rezzenéstelenül középen nem marad. Előfordul, hogy szép lassan azért elvándorol, de ilyenkor akár lassítással, akár gyorsítással újra középre hozhatjuk.
4) Élvezzük
5) Amennyiben északon nézelődünk, úgy a deklinációs motoron irányt váltunk a megfelelő kapcsolóval, és folytatjuk a megfigyelést.
Megdöbbentően hamar megszokható, hogy mikor mennyit kell fordítani a potméteren ahhoz, hogy a követés helyes legyen. Tulajdonképpen, ha elég masszívan építettük ki a motor felfüggesztését és a forgatást, akkor a vezérlés megszokásához egy perc elég. De tényleg nagyon fontos a stabil motorfelfüggesztés. Itt nem szabad spórolni sem az anyaggal, sem a ráfordított munkaórával.
Hátrány
Fotózáshoz nem lesz jó.
Kizárólag vizuális észlelőknek használható ez a megoldás
Előny
Olcsó, némi fantáziával bármilyen mechanikához adaptálható.
Könnyen kezelhető, strapabíró.
Kényelmes észlelést tesz lehetővé.
Ugyan az én távcsövem azimutális, de azt gondolom, hogy egyetlen barkácsolási hajlammal bíró Dobson tulajdonosnak sem okoz gondot a követés megoldása az ismertetett pwm-ek és nyomatékmotorok ismeretében. Tulajdonképpen a szabályozható egyenáramú nyomatékmotorok elve a lényeg, nem az általam alkalmazott műszaki megoldás.
Remélem lesznek akik kedvet kapnak az építéshez, jó barkácsolást mindenkinek!
Varga Zsolt


{kind=link}