Október 3-án landol az európai MASCOT robot a Ryugu aszteroidán
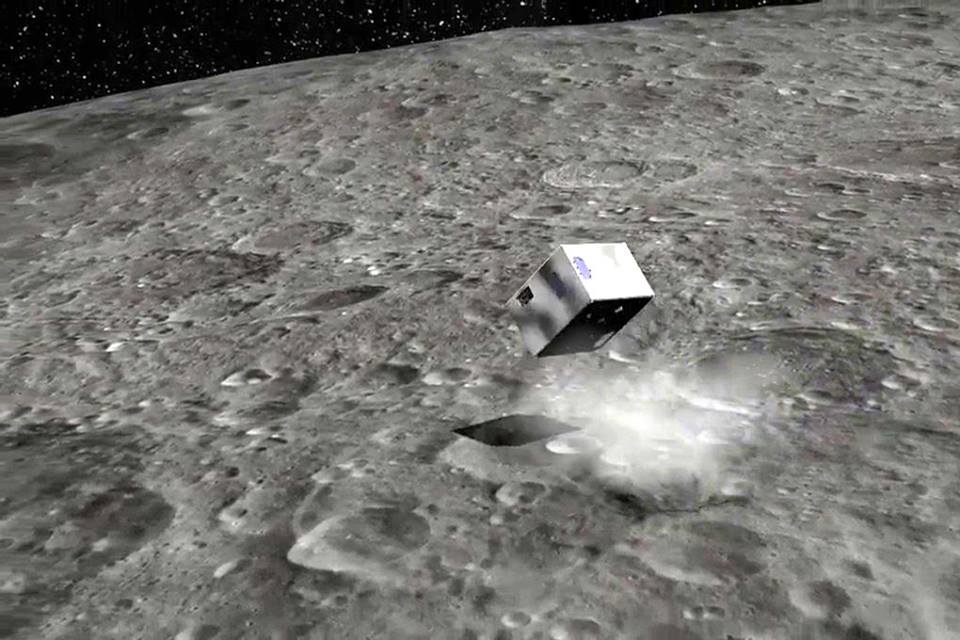
A japán Hajabusza-2 űrszonda több robot leszállóegységet vitt magával a Ryugu aszteroidához, ezek egyike az Európai Űrügynökség MASCOT (Mobile Asteroid Surface Scout) nevű egysége. A nagyobb cipős doboz méretű (30x30x20 cm) robot össztömege 10 kg, a műszerei 3kg-t tesznek ki. Augusztus végén, a Hajabusza fotói és mérései alapján jelölték ki a robot leszállóhelyét, ahol majd eléri a kisbolygó felszínét, s azon kis pattogást követően megáll. A robot belsejébe épített lendítőszerkezet segítségével akkor is megfelelő irányba tudja magát hozni, ha rossz felével esett, így a műszereit a kívánt célpontokra tudja majd irányítani. A célterület az aszteroida déli féltekéjén van, s a tervek szerint hajnali 03:58-kor fog a 60 m magasan keringő, de a manőver idejére szabadesésben közlekedő szondából kiválni, s az aszteroida gyenge gravitációja révén maximum 15-20 cm/s sebességig gyorsul fel (ez heted akkora sebesség, mint az emberi járásé), így relatíve puhán érkezik le, 5-10 percen belül. Kritikus pillanat a szonda elhagyása, ha minden rendben zajlik, akkor a robot finoman kicsusszan a szonda oldalán lévő üregéből, ezt az üreg belsejébe elhelyezett fényérzékelő jele révén tudja majd meg a földi irányítás. Az üregbe besüt a nap, s ezt az információt továbbítja a szonda a Földre. Emellett a Hajabusza kamerái is az oldalából előcsúszó robot irányába néznek, s rögzítik az eseményeket. A MASCOT kb. 50 métert kell megtegyen ekkor a felszínig, ahol egy ideig pattogni fog. Ha a szonda oldalából a kicsúszás valamiért nem a tervek és a tesztek során beállított finom módon zajlik, akkor a robot akkora erővel pattanhat vissza a felszínről, hogy eléri a kisbolygó alacsony szökési sebességét, s így visszakerül az űrbe – reméljük, hogy ez a rémtörténet nem következik be! A következő kritikus pont maga a végleges landolás, vagyis a pattogást követő hely, erre semmilyen hatása sincs a robotnak, így ha esetleg túlzottan puha (vastagon poros) helyre, vagy valami hasadékba érkezik, ott nem fog tudni „felegyenesedni” a belső mozgatómechanizmusa révén. Az aszteroida felületére elvégzett számítások alapján az irányítók szerint ennek igen kicsi az esélye, így valószínűleg szerencsésen éri el a végleges helyét a MASCOT.
A landolás helye az aszteroida megvilágítási ideje miatt kedvező, valamint a környezeti hőmérsékletek se túl extrémek (+47 és -63°C közti), a kiszemelt területen viszonylag kis méretű sziklák vannak, s csak néhány éri el a 30 méteres nagyságot.
A stabil landolás és a talpra állás után a robot megkezdi az összesen 16 órás működési idejét Az első, néhány órás mérési szakaszt követően az irányítók kiértékelik az addigi működésé, és ez alapján döntik el, hogy merre tovább. Ha úgy tűnik helyesnek, akkor a lendítőszerkezete révén a landolási helytől elugrik, maximum 10 méter távolságba, s újabb mérésekbe kezd. Az akkumulátora teljesítményét (ami a robot működési idejét meghatározza) kímélendő az is lehet, hogy egyáltalán nem fogják más pontra ugrasztani a robotot. Azért se túl fontos ez, mert a Hajabusza-2 legfrissebb mérései szerint meglehetősen homogén összetételű a kisbolygó felszíne, így túl sok újdonságot nem adna egy pár méterrel távolabbi újabb mérés. A robot egyébként akár 220 métert is képes lenne ugrásokkal megtenni a Ryugu felszínén.
A robot és a földi irányítás közti kétirányú kommunikáció jó 30 perces időt vesz igénybe, és csak kevés olyan időablak lesz, amikor közvetlenül lehet a leszállóegységnek parancsot küldeni. Ennek okán a MASCOT a működése idején a feladatai legnagyobb részét önállóan kell végigvigye, és a műszerei, programozása révén erre teljesen alkalmas is. A robot négy műszert vitt magával:
– MicrOmega – infravörös hiperspektrális mikroszkóp az aszteroida ásványainak vizsgálatára
– MASCAM – a nagylátószögű kamera, amelyhez szintén tartozik spektrométer, ezzel a vizsgálati helyszín nagyobb léptékű képét ismerhetik majd meg a kutatók
– MasMag – a magnetométer
– MARA – radiométer, amellyel az aszteroida hőmérsékleti viszonyait fogják vizsgálni
A rádiókapcsolata nem épp széles sávú, így a mérések idején csak a főbb státusjelentéseket és a parancsokra vonatkozó adatokat továbbítják, a mérések és felvételek adatai majd csak néhány nap alatt kerülnek haza. A rádiókapcsolat a Hajabusza közvetítésével áll fenn, s robot által felsugárzott adatokat is majd a szonda fogja továbbítani a Földre.
A leszálláskor a DLR (a német űrügynökség, ők tartják a kapcsolatot a MASCOT-tal) élő sajtótájékoztatót tart, amelyet a következő linken lehet majd követni 3-án délelőtt 10 órától. Ennek során a robot státuszjelentéseiről is beszámolnak majd, de adatokra senki se számítson még!
Folyamatos friss híreket a leszállóegység irányítócsapata a Twitteren tesz majd közzé, ami ezen a címen elérhető.
További információk, videók itt1, itt2 és itt3.
Ha valakit a műszerek részletes technikai leírása érdekel, itt letölthető.
Landy-Gyebnár Mónika
(További fordítások a szerzőtől facebookon: Égen – Földön – Föld alatt)

{kind=link}